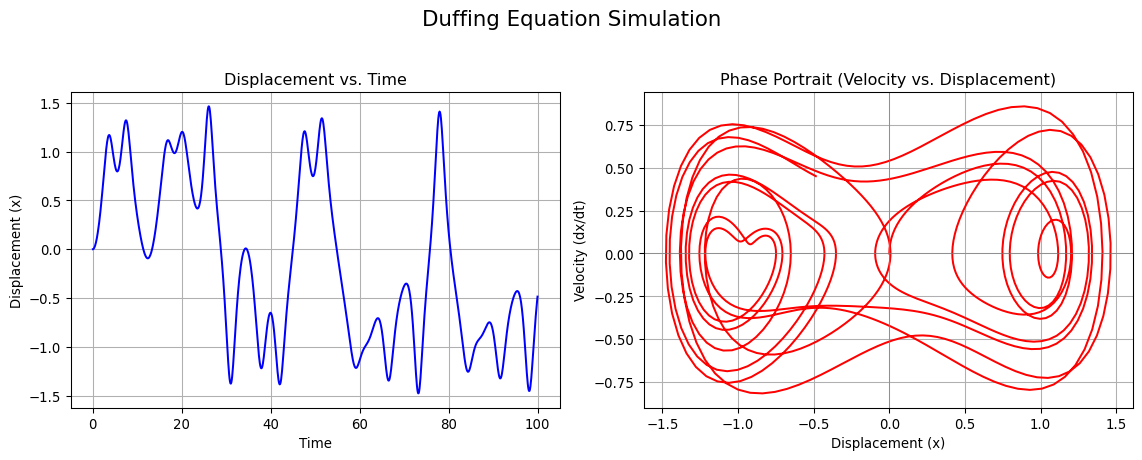
import numpy as npfrom scipy.integrate import odeintimport matplotlib.pyplot as plt# --- 1. Define the Duffing Equation as a system of first-order ODEs ---# The Duffing equation is a second-order non-linear differential equation:# x'' + delta*x' + beta*x + alpha*x^3 = gamma*cos(omega*t)# We convert it to a system of two first-order ODEs for numerical solution:# Let y[0] = x (displacement)# Let y[1] = x' (velocity)# Then, y[0]' = y[1]# And, y[1]' = gamma*cos(omega*t) - delta*y[1] - beta*y[0] - alpha*y[0]**3def duffing_model(y, t, delta, alpha, beta, gamma, omega):""" Returns the derivatives of the state variables for the Duffing equation. Args: y (list): A list or array containing the state variables [x, x']. t (float): The current time. delta (float): Damping coefficient. alpha (float): Coefficient for the non-linear term. beta (float): Coefficient for the linear restoring force. gamma (float): Amplitude of the periodic forcing term. omega (float): Frequency of the periodic forcing term. Returns: list: The derivatives of the state variables [x', x'']. """ y0_prime = y[1] y1_prime = gamma * np.cos(omega * t) - delta * y[1] - beta * y[0] - alpha * y[0]**3return [y0_prime, y1_prime]# --- 2. Set up the parameters and initial conditions ---# Parameters for the Duffing oscillatordelta =0.2# Dampingalpha =1.0# Non-linear spring coefficientbeta =-1.0# Linear spring coefficient (negative for a bistable potential)gamma =0.3# Forcing amplitudeomega =1.0# Forcing frequency# Initial conditions [x(0), x'(0)]y0 = [0.0, 0.0]# Time points to solve fort = np.linspace(0, 100, 1000)# Pack parameters into a tupleparams = (delta, alpha, beta, gamma, omega)# --- 3. Solve the ODE using odeint ---# The odeint function returns an array where each row is a solution for a time point.solution = odeint(duffing_model, y0, t, args=params)# --- 4. Plot the results ---# Separate the solution into displacement (x) and velocity (x')x_solution = solution[:, 0]x_prime_solution = solution[:, 1]# Create a figure with two subplots side-by-sidefig, (ax1, ax2) = plt.subplots(1, 2, figsize=(12, 5))fig.suptitle('Duffing Equation Simulation', fontsize=16)# Plot Displacement vs. Timeax1.plot(t, x_solution, 'b-')ax1.set_title('Displacement vs. Time')ax1.set_xlabel('Time')ax1.set_ylabel('Displacement (x)')ax1.grid(True)# Plot the Phase Portrait (Velocity vs. Displacement)ax2.plot(x_solution, x_prime_solution, 'r-')ax2.set_title('Phase Portrait (Velocity vs. Displacement)')ax2.set_xlabel('Displacement (x)')ax2.set_ylabel('Velocity (dx/dt)')ax2.grid(True)ax2.axhline(0, color='gray', linewidth=0.5)ax2.axvline(0, color='gray', linewidth=0.5)# Adjust layout and display the plotsplt.tight_layout(rect=[0, 0.03, 1, 0.95])plt.show()